OpenTX 2.1: Présentation de la télémétrie
La principale amélioration pour OpenTX 2.1, résultat de quelques mois de travail, est une refonte complète de la façon dont est gérée la télémétrie.
Le système existant en 2.0 et antérieur est basé sur 2 anciens systèmes qui imposent trop de limitations par rapport aux possibilités des équipements d’aujourd’hui :
• Le système FrSky D, qui suppose un environnement «gelé» avec un nombre donné de types de capteurs et de comptage.
• Le 9X et ses ressources limitées qui nécessitent une gestion de la télémétrie optimisée pour ce système, et étroitement dépendante de l’affichage et des menus pour économiser de la mémoire, ce qui la rend très rigide, toute modification étant complexe et non évolutive du tout.
La meilleure solution était donc d’effacer tout ce qui touche à ce système et de recommencer à partir de zéro, avec la même approche « générique » utilisée pour tous les autres aspects du firmware pour permettre un maximum de flexibilité et le rendre résistant aux changements en rendant les évolutions futures faciles. Il est même prêt à accepter facilement des protocoles de télémétrie complètement nouveaux.
Quelques points-clés du résultat:
• Chaque valeur reçue est traitée comme un « capteur » séparé avec ses propres propriétés (unité, la précision de la décimale, le ratio/offset) et les options (offset automatique, le filtrage, le stockage persistant à la mise hors tension, l’enregistrement activé). Chaque capteur a son propre nom défini par l’utilisateur et garde une trace de ses propres valeurs min/max.
Exemple: l’ajout d’un capteur nommé Alt ajoutera automatiquement Alt- et Alt+ qui correspond respectivement à sa plus petite et sa plus grande valeur enregistrée pendant le vol.
Colonnes 1-2-3-4-5
Nom du capteur reconnu ou calculé
Type
-Prédéfini : capteur reconnu.
-Calculé : peuvent être créés manuellement pour combiner les valeurs ou extraire des données supplémentaires des capteurs reconnus (min, max, etc). Voir le Zoom ci-dessous.
Id : pour identifier la donnée (Data ID de Frsky) .
Instance : Adresse du capteur, cette valeur peut être modifié par le SCC (Physical ID (PhyId) de Frsky).
Unité: Peut faire les conversions kt, m/s, km/h, ft/s, mph.
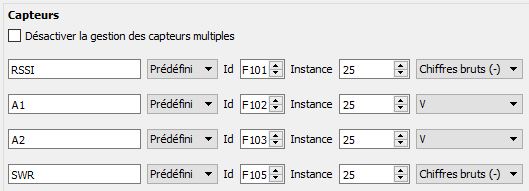
[*]Désactiver la gestion des capteurs multiples
[*]: C’est une solution temporaire pour certains capteurs tierce partie qui n’utilisent pas le smart port correctement et remplissent instantanément les 32 slots avec un tas de copies du même capteur, le temps qu’ils soient mis à jour. Si on n’a pas un de ces capteurs y’en a pas besoin.
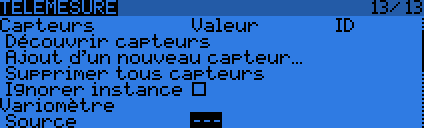
Sur la radio c’est la ligne « Ignorer instance » de la page TELEMESURE 13/13.
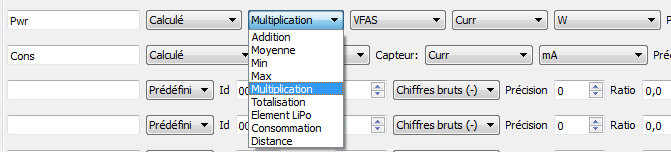
Zoom sur Type calculé:
Addition: additionne 2 valeurs
Moyenne: retourne la moyenne des éléments sélectionnés dans les champs qui suivent, jusqu’à 4 au choix.
Min/Max: retourne la plus petite resp. la plus grande valeur des éléments sélectionnées dans les champs qui suivent, jusqu’à 4 au choix.
Multiplication: multiplie 2 valeurs. Ex: la puissance = tension * courant. Donc Puis (W) = VFAS (V) * Curr (A)
Totalisation: accumule une valeur.
Elements LiPo: permet d’accéder au 6 mesures des 6 élements de la LiPo branchés sur le capteur FLVSS.
Consommation: La consommation est intégré dans le temps à une fréquence 2-5Hz, alors que la totalisation ajoute simplement chaque valeur reçue. Peut être utilisé pour calculer l’énergie consommée à partir de capteurs de tension et de courant.#2793
Distance: mesure la distance entre la radio et votre modèle.
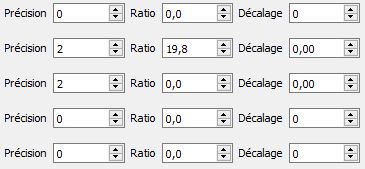
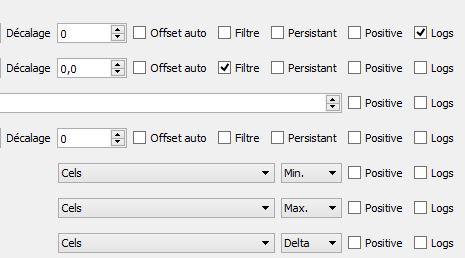
Colonnes 6-7-8
Précision: 0,1,2 = unité,dixième,centième
Ratio: Le ratio est actuellement encore une relique de l’ancien système pour accommoder les entrées analogiques A1/A2 et correspond donc à « quelle est la valeur réelle quand on reçoit 255 du récepteur ».
Dans le cas de A1 ou A2, Ratio a la même signification que range : Range définit la tension maximum mesurable, soit 3,3 V / (ratio de diviseur). Par exemple avec un capteur interne de récepteurs (1: 4), ce serait 13.2V. Pour le capteur FBVS-01 avec le rapport par défaut de 1: 6, ce serait 19.8V.
Décalage: Valeur à ajouter pour obtenir 0.
Colonnes 9-10-11-12-13
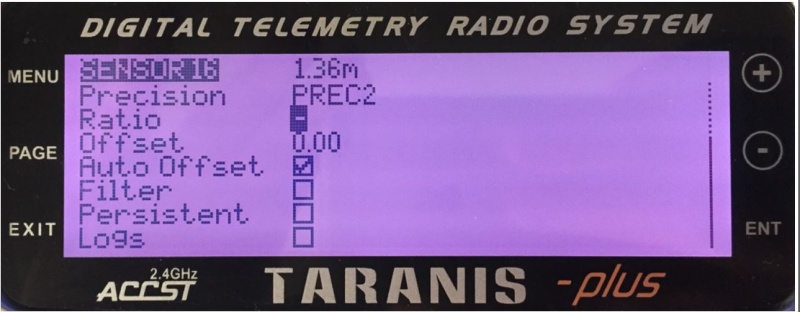
Offset auto: Lit la 1ère valeur, puis soustrait cette valeur pour toutes les données suivantes. Exemple d’utilisation: affiche 0m au démarrage avec un vario.
Filtre: Filtre glissant sur 5 échantillons. Cela permet d’avoir une valeur plus stable qui « vibre » moins.
Persistant: Valeur permanente qui ne s’efface pas à la mise hors tension de la radio.
Positive: Toutes les valeurs négatives sont remplacées par des 0. Exemple d’utilisation: pour les capteurs de courant. S’il y a une erreur de mesure ou transmission, cela évite de faire croire que la batterie se recharge…
Logs: Active enregistrement des données dans le LOG. Il faut activer la fonction spéciale « Démarrer les Logs ».

• Dans le cas du système FrSky, ces capteurs sont auto-découverts quand la radio et le récepteur / capteurs sont alimentés.
Depuis la 2.1.2, les capteurs de télémétrie ne sont plus détectés en permanence, il est maintenant nécessaire d’aller à la page de configuration de télémétrie et de sélectionner l’option « Découvrir capteurs/ Terminer découverte » . Cela empêche la création de capteurs fantômes dans le cas d’erreurs de transmission, et permet la suppression des capteurs qui sont reçus, mais considérés comme sans intérêt.
• Les capteurs peuvent être dupliqués, si par exemple une valeur donnée, par exemple l’altitude à partir du même capteur de vario peut être affiché/annoncé/connecté simultanément dans différentes unités, ou avec différentes options (altitude absolue et de l’altitude au dessus du point de départ avec auto ou manuel offset…)
• Les capteurs physiques multiples retournant la même valeur sont pris en charge tant qu’il y a un moyen de les différencier. Avec le système S-Port FrSky cela signifie que vous pouvez connecter un nombre quelconque de capteurs identiques aussi longtemps que vous veillez à changer les identifiants des capteurs (Physical ID) avec le canal de servo changeur FrSky SBUS (SCC) au besoin de sorte que chaque ID soit unique dans chaîne S-Port (expliqué dans les manuels des capteurs et des SCC). Si vous voulez mesurer les courants individuels des moteurs de votre octocopter avec 8 capteurs FCS-40A, pas de problème.
• Les capteurs « calculés » (virtuels) peuvent être créés manuellement pour combiner les valeurs ou extraire des données supplémentaires. Les valeurs peuvent être ajoutées, moyennées ou multipliées, le minimum ou maximum d’un ensemble de jusqu’à 4 valeurs peuvent être extraite. Ceci prend également en charge les «cas spéciaux» comme le calcul de la distance GPS (2D ou 3D), obtenir la valeur d’une cellule particulière d’un capteur de cellule de lipo, le calcul mAh de consommation, etc. Par exemple la puissance peut être calculé facilement en multipliant la tension associée et le courant, les tensions de plusieurs capteurs de cellules lipo pouvant être ajoutés pour obtenir la tension totale du pack en série, la cellule minimum de chacun d’entre eux peut être extrait et le plus bas de tous peut être trouvée en utilisant la fonction minimum.
Exemple avec un X8R connecté à un FLVSS, les capteurs calculés sont appliqués au capteur Cels:
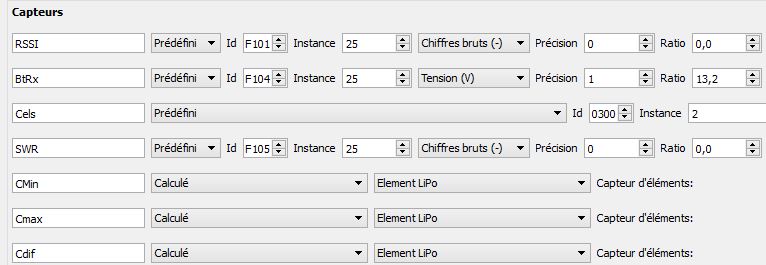
Je récupère sur ma radio les valeurs suivantes provenant d’une lipo 3S:
CMin la tension de la cellule la plus basse = 4.12V
Cmax la tension de la cellule la plus haute = 4.14V
Cdif la différence des deux = 0.02V
• Chaque capteur peut être réinitialisé individuellement avec une fonction spéciale, pour ne plus de perdre tous vos valeurs min / max quand vous voulez juste réinitialiser le décalage au point de départ d’altitude.
• Bien sûr, chaque capteur peut être utilisé partout comme avant pour les annonces vocales, en commutateurs logiques, en entrée pour les actions proportionnelles, et peut être affiché sur des écrans de télémétrie personnalisés. Un grand avantage est que les valeurs peuvent être vu directement sur la page de configuration de télémétrie, donc pas besoin d’ajouter un à un des écrans personnalisés juste pour avoir un coup d’œil une fois. La réception d’une donnée nouvelle est visualisée (*), et la perte d’un capteur est détectée automatiquement.
Quelques captures d’écran:
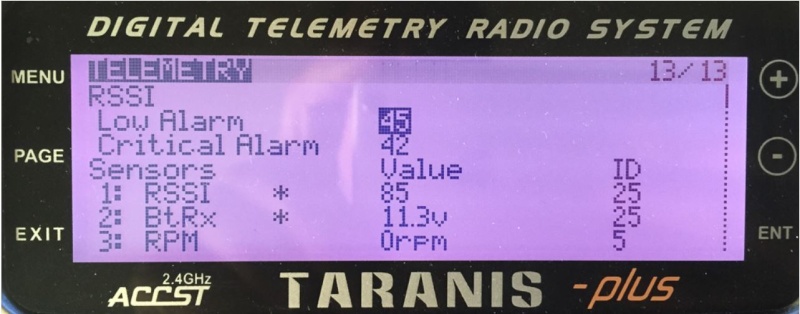
RSSI et RX tension venu tout droit du récepteur
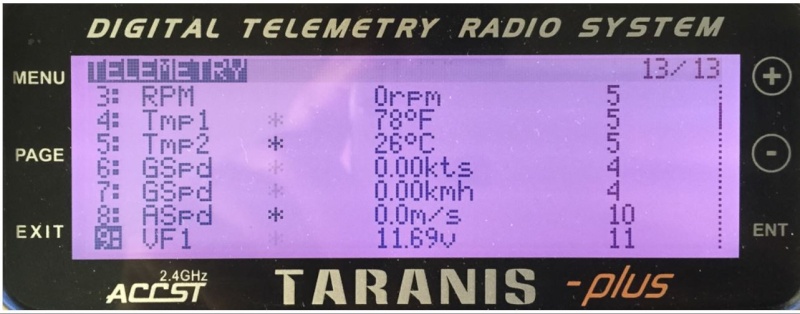
Capteur RPM avec ses deux capteurs de temp, on affiche l’un en ° F et un autre en ° C, la vitesse du GPS est affichée à la fois en km / h et kts
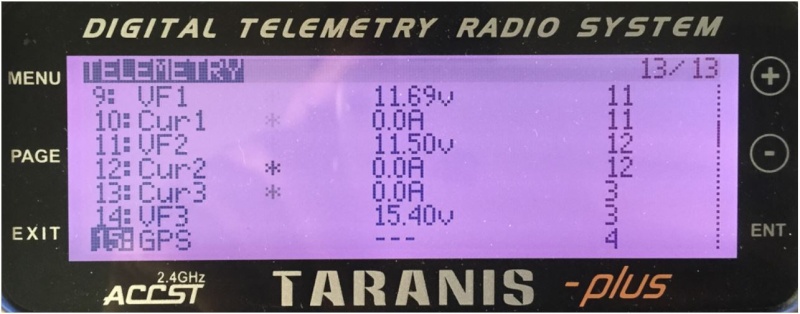
Trois capteurs de courant différents
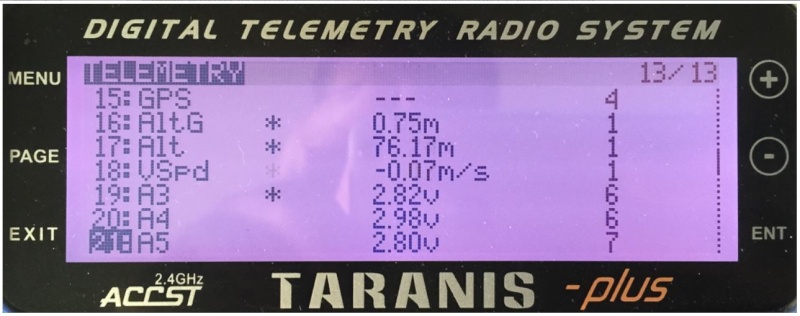
Altitude du capteur de vario, à la fois avec et sans décalage automatique
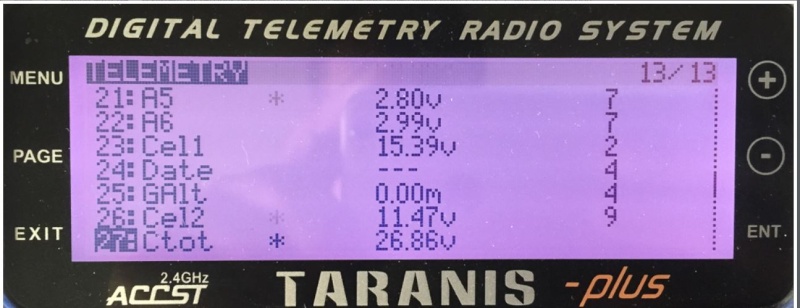
Une série de valeurs analogiques de 2 capteurs de SP2UART, 2 capteurs cellulaires et leur totale
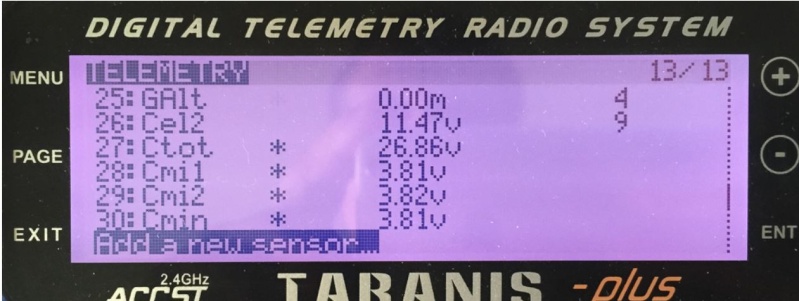
Min cellule de chaque cellule de capteur, et de tous les min
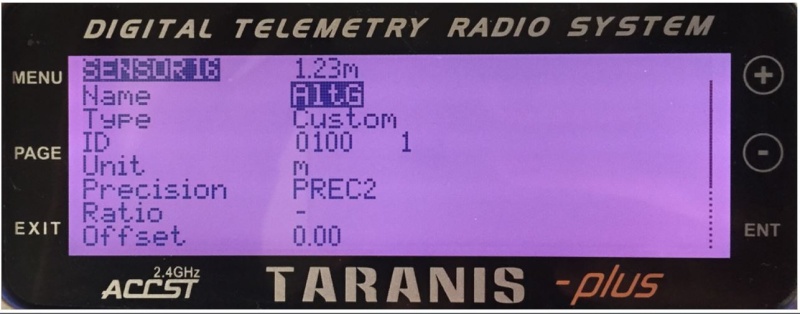
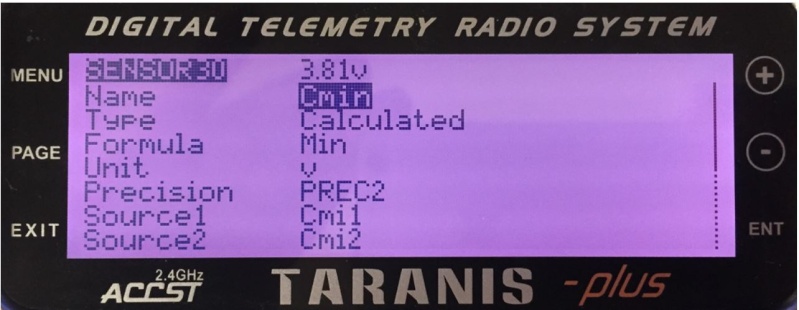
Informations standard sur la configuration d’un capteur
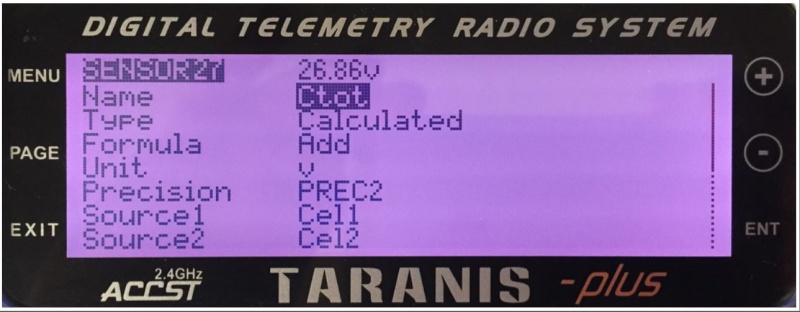
L’ajout de deux valeurs
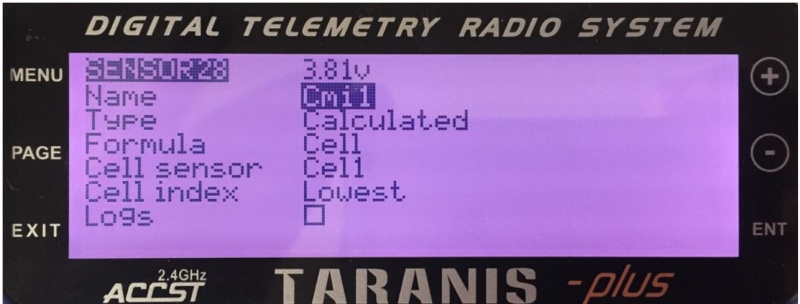
Trouver la cellule la plus basse
Trouver la valeur minimale d’un ensemble